sg90 서보모터는 빨간선, 5V전원 주황선은 PWM 포트, 갈색선은 GND에 연결시켜준다.
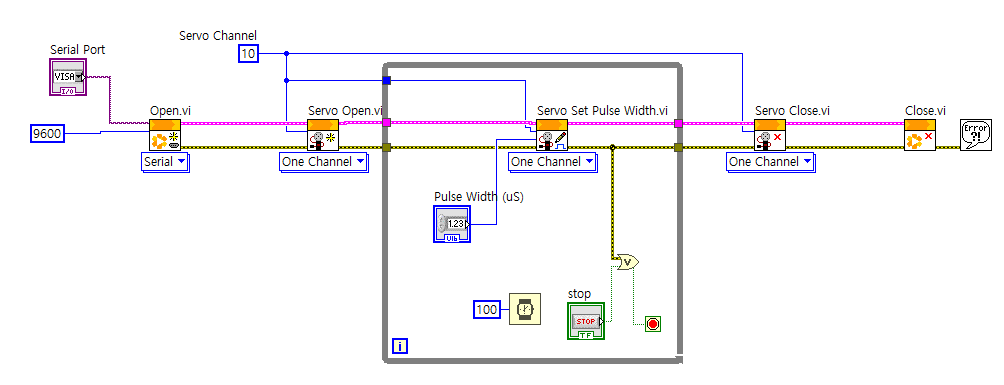
랩뷰를 실행시킨 후 블록다이어그램에서 다음과 같이 간단한 코드를 작성해준다. 아두이노를 연결하고 서보모터를 열어준다음 펄스를 받아들이는 부분만 루프로 감싸준다.
시리얼 포트를 지정하고 서보가 움직일 각도를 펄스를 통해서 지정해준다. sg90의 경우 450us일때 -90도 2450us일때 90도로 움직인다.
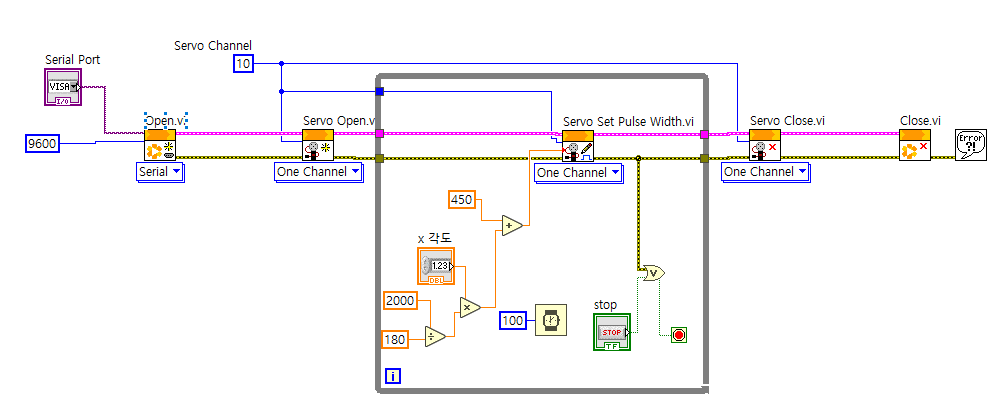
입력값을 각도를 통해서 조절하려면 펄스입력 값에 를 450 + 2000/180*x 넣어주면 각도변화에 따른 펄스값을 계산할 수 있다. (x 는 0에서 180)
참고
https://www.youtube.com/watch?v=pt9d9Md7788
서보모터 데이터시트
https://servodatabase.com/servo/hextronik/hxt900
Hextronik HXT900 Servo Specifications and Reviews
ServoDatabase.com Servo Specifications and Reviews Servo Database Hextronik Servos HXT900 Hextronik HXT900 - 9g Micro Servo Specifications Modulation: Analog Torque: 4.8V: 22.20 oz-in (1.60 kg-cm) Speed: 4.8V: 0.12 sec/60° Weight: 0.32 oz (9.1 g) Dimensio
servodatabase.com
반응형
'만들기 > 랩뷰(labview)' 카테고리의 다른 글
| enumeration conflict 열거형이 충돌합니다. (0) | 2022.09.15 |
|---|---|
| [matlab] 아두이노 여러개의 아날로그 데이터를 3D 그래프로 나타내기 (0) | 2022.07.06 |
| [랩뷰] LINX에서 L298N 드라이버로 DC모터 제어하기 (0) | 2022.01.22 |
| LINX와 아두이노 메가는 잘 연결되지 않는다. (0) | 2022.01.21 |
| [랩뷰] LINX 로 랩뷰에서 아두이노 연결하여 LED 제어하기 (0) | 2022.01.21 |


